侯永全,馬立方,方濤,吳波,梅霜,王晶晶,孫安冉,夏晨陽
(1.國網江蘇省電力有限公司沛縣供電分公司,江蘇 徐州 221600;
2.中國礦業大學 電氣工程學院,江蘇 徐州 221116)
隔離開關作為電力系統的重要組成部分,其可靠工作對電力系統的穩定運行具有重要意義[1]。尤其是對于敞開式設備,機械結構直接暴露在空氣當中,其具有操作次數有限,軸銷、軸承等機械部件潤滑和相對運動較少的特點,使得傳動機構銹蝕,操作過程卡頓,可能出現開關拒合、拒分及傳動機構斷裂等現象,甚至造成瓷瓶斷裂,導致設備故障跳閘[2-3];
因此,研究隔離開關分合到位判斷方法具有重要的理論意義與實際工程應用價值。
為融合先進感知技術,探索主網智能運維模式,目前一些變電站逐步開展開關位置“雙確認”技術的研究和試點應用[4-5]。所謂開關位置“雙確認”是指無法直接看到隔離開關實際位置時,通過間接方法中至少2個非同樣原理或非同源的指示發生對應變化,來判斷隔離開關分合是否到位[6-7]。實際工程實踐中一般將輔助接點動作信息作為第一判據,再選擇電壓、電流、位置等檢測量作為第二判據輔助判別[8-10],實現隔離開關位置“雙確認”;
因此,研究隔離開關位置輔助判斷方法對于隔離開關位置“雙確認”系統至關重要。
現有的隔離開關位置輔助判斷方法主要分為微動開關輔助判斷技術[5]、傳感器輔助判斷技術[6-9]以及圖像處理技術[10-12]3類。第一類微動開關輔助判斷技術借助微動開關,利用機械傳動原理,無需單獨對其供電,僅僅依靠機械式接點反映隔離開關行程狀態,并且可以直接接入變電站監控系統,成本較低且維護簡單,目前被廣泛應用[11]。第二類傳感器輔助判斷技術指借助傳感器采集隔離開關系統特征物理量,通過對被采物理量進一步處理,建立相應的隔離開關狀態判斷體系,可以實現隔離開關分合位置的準確判斷。文獻[12]利用霍爾傳感器,將現場的分合位置指示、機械連桿位置轉變成狀態信號,將狀態信息傳輸至主控室,可實現隔離開關位置的判斷;
文獻[13]選用高精度激光傳感器,通過傳感器傳回的距離信息,判斷隔離開關是否分合到位;
文獻[14]基于MPU9250姿態傳感器設計一套隔離開關狀態監測系統,提出了一種隔離開關狀態判定算法,可實現隔離開關的分合狀態判斷;
文獻[15]利用紅外漫反射光電開關直接監測隔離開關位置,并聯合電感式接近開關間接監測隔離開關位置,可實現隔離開關位置的判斷。第三類圖像處理技術指先通過在隔離開關本體周圍設置固定攝像機,或者利用現代化智能巡檢機器人及無人機等設備獲取隔離開關本體圖像信息,將圖像信息進行初步處理后傳回終端設備,根據智能圖像處理算法,建立隔離開關姿態識別模型,之后使用姿態識別模型處理傳回圖像的信息要素,實現隔離開關姿態的識別[16]。文獻[17]以單臂水平伸縮式隔離開關為例,通過激光雷達獲取開關導電臂點云數據,進一步處理數據后提出一種基于導電臂方向向量夾角的隔離開關合閘狀態檢測方法,可實現隔離開關合閘狀態的自動檢測;
文獻[18]將三維隔離開關圖像轉換為彩色點云數據,提取場景特征,采用圖像處理算法建立姿態估計模型,采用霍夫投票算法過濾對應集中的匹配誤差,測算隔離開關的三維姿態信息,可實現隔離開關姿態的識別;
文獻[19]在結合決策樹算法和廣義霍夫變換實現隔離開關定位的基礎上,進一步采用隨機森林算法以及粒子群算法提升識別的準確率。
縱觀現有的3類隔離開關分合狀態判斷方法,目前都存在一定的不足,如:第一類方法僅能反映隔離開關是否完成分合,難以實現隔離開關分合過程中的姿態感知,不利于后續的故障診斷及維護;
第二類方法使用的不同類型傳感器則受到不同的制約(如激光傳感器易受環境光線影響且單束激光容易出現遮擋問題,紅外傳感器成像質量易受環境溫度影響等),并且傳感器安裝位置不便供電,大多存在難以長期供電的問題,需要定期更換電池等供電設備,增加后期維護成本;
第三類方法則受限于目前圖像處理算法尚不夠成熟,姿態識別成功率存在一定誤差,并且相較于其他方法而言成本較高,該技術還存在較大的提升空間。
針對現有隔離開關分合狀態判斷技術的不足,本研究基于電磁感應原理,提出一種隔離開關分合到位判斷方法。該方法通過在動觸頭側安裝無源接收線圈及電壓感知元件,在靜觸頭側安裝磁能發射線圈及控制裝置,基于磁耦合諧振式無線電能傳輸原理,通過辨識隔離開關分合運動帶來發射、接收線圈互感變化引起的感應電壓變化,實現隔離開關位置判別。本研究所提出的隔離開關位置判斷方法可作為輔助接點的非同源指示,與輔助接點判斷裝置構成“雙確認”系統,實現隔離開關位置可靠判別。
1.1 系統構成
基于電磁感應原理的隔離開關位置判斷系統及其安裝示意圖如圖1所示,圖中MCU為微控制單元(microcontroller unit)。
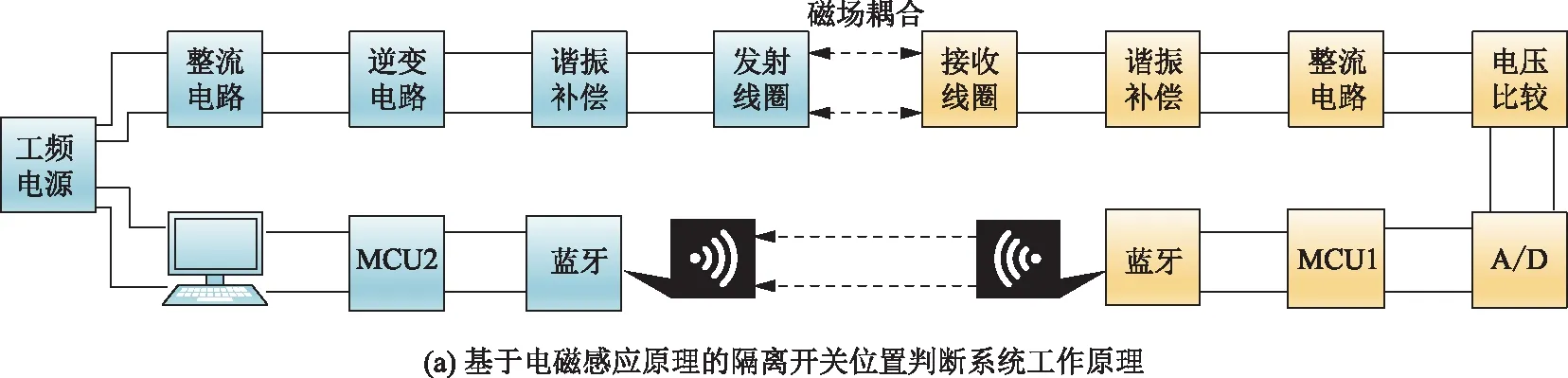
圖1 隔離開關位置判斷系統及其安裝示意圖
如圖1(a)所示,所提系統結構包括電能傳輸部分、信號處理及傳輸部分。電能傳輸部分包括工頻交流電源、整流逆變電路、原邊(發射端)諧振補償電路、能量發射線圈、能量接收線圈、副邊(接收端)諧振補償電路。工頻電源經整流電路轉化為直流電,經過高頻逆變器后再轉化為高頻交流電,高頻電流經過原邊諧振補償電路的作用,流經電能發射線圈產生高頻磁場,通過發射線圈與接收線圈間的耦合作用,電能以無線的方式傳輸至副邊,經過整流環節,高頻交流電再次被轉換為負載可用的直流電,為負載供電。信號處理及傳輸部分包括A/D采樣模塊、通信發射與接收模塊、終端接收處理設備。
其安裝示意圖如圖1(b)所示,工頻電源、整流逆變電路、諧振補償電路、能量發射線圈、信號接收與處理電路安裝于隔離開關底座,能量接收線圈、副邊諧振補償電路、相關信號處理與傳輸網絡安裝在動觸頭連桿上。安裝發射線圈與接收線圈時,需確保在隔離開關完全合閘時兩線圈完全正對,以確保此時出現感應電壓峰值。另外,本系統的功率等級與隔離開關承載的電壓、電流等級差距較大,因此系統的安裝不會對隔離開關的運行帶來風險。
1.2 隔離開關位置輔助判別原理
根據1.1節對系統基本工作原理的介紹可知,所提方法主要關注隔離開關動作過程中動觸頭本體運動帶來的發射線圈與接收線圈間互感變化所導致的感應電壓變化,根據隔離開關位置與感應電壓之間的映射關系以及感應電壓大小,判斷隔離開關當前位置,從而辨識隔離開關狀態。其中A/D采樣模塊采集副邊感應電壓,利用通信模塊將信息傳回原邊,原邊處理器通過分析隔離開關動作過程中感應電壓的變化,實現隔離開關狀態的判斷。
為分析隔離開關動作過程中感應電壓變化,判斷隔離開關當前狀態,首先建立靜觸頭側發射線圈與動觸頭側接收線圈的兩線圈空間模型,如圖2所示,圖中P、S分別為發射、接收線圈的圓心,ip、is分別為發射、接收線圈內的電流,dlp為發射線圈切向長度lp的微元,dls為接觸線圈切向長度ls的微元;
lps為2個線圈的軸向間距。

圖2 兩線圈空間模型
圖2中發射、接收線圈半徑r相同,平行放置,接收線圈隨隔離開關運動位置不斷改變,則根據聶以曼公式[20]可得任意空間位置下兩線圈間的互感
(1)
式中:Np為發射線圈匝數;
Ns為接收線圈匝數;
μ0為真空磁導率;
rps為2個微元間的幾何距離。從式(1)中可以看出,發射、接收線圈相對位置變化將導致M變化。
圖 3為隔離開關不同位置時磁通密度仿真圖,圖3(a)、(b)、(c)分別為線圈正對、不完全偏移、完全偏移時磁通密度圖像,分別對應隔離開關完全合閘、進入接觸區域、未進入接觸區域時3種情況。
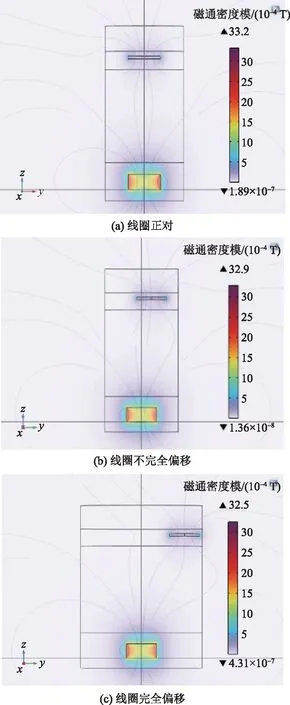
圖3 隔離開關不同位置時磁通密度仿真圖
從圖3中可以看出發射、接收線圈處于不同位置時磁通密度不同,并且當線圈正對(即隔離開關位于完全合閘狀態)時達到最大;
因此,隔離開關的運動會使得發射線圈與接收線圈之間發生偏移,線圈間互感M隨之發生變化,副邊感應電壓也發生變化。當隔離開關完全合閘時發射線圈與接收線圈正對,此時M最大,將出現感應電壓峰值。
發射線圈與接收線圈之間依靠電磁耦合傳能,因此當線圈之間出現金屬部件時,金屬部件中會出現渦流效應,帶來一定的渦流損耗并使得金屬部件發熱,單位體積鐵芯內的渦流損耗Pe的近似計算式為
(2)
式中:σ為鐵芯材料的電導率;
f為電源頻率;
d為疊片厚度;
Bm為磁感應強度幅值。
本系統中能量傳輸距離較遠,且設計的接收線圈功率等級較低,因此發射、接收線圈間高頻電磁場強度較小。從圖3中亦可得出,當發射、接收線圈位置正對時磁場強度最大;
但即使在此時,由于功率等級的限制,本系統中電磁場渦流損耗影響有限。
由圖1所示系統工作原理可知,隔離開關運動過程中感應電壓發生變化,基于該變化的隔離開關狀態判別原理如圖4所示,圖中Q為隔離開關的支點,l為隔離開關本體的動作距離,Us為感應電壓。

圖4 隔離開關位置輔助判斷原理
由圖4可知:當隔離開關處于分閘狀態時,發射、接收線圈完全偏移,線圈間互感最小,此時接收線圈感應電壓較低;
當隔離開關開始合閘動作時,隨著隔離開關行程變化,線圈間互感隨之變化,接收線圈感應電壓亦隨之變化,當隔離開關運動至l1(發射、接收線圈在空間平面上相切)處,隔離開關開始進入觸點接觸區域,感應電壓達到閾值U1并繼續增大,在此階段隔離開關并未完全合閘;
隔離開關進一步運動,直至l2(發射、接收線圈在空間上正對)處,感應電壓達到閾值U2,線圈完全正對,視為完成合閘。
根據上述情況制訂隔離開關狀態判別邏輯,動觸頭當前狀態
(3)
系統通過檢測隔離開關運動過程中發射、接收線圈互感變化引起的感應電壓變化,判斷隔離開關位置。隔離開關制作材料主要為金屬材料,并且承載功率等級較高,對周圍電子設備存在一定的電磁干擾;
因此,實際現場中電磁環境較為復雜,這些因素均可能成為影響隔離開關位置檢測的干擾因素。在實際工作中可從電磁屏蔽的角度入手加入電磁屏蔽措施,降低周圍電磁環境對于隔離開關位置檢測系統的影響。
2.1 拓撲結構分析



圖5 系統電路結構
LCC-S型無線電能傳輸系統滿足參數條件:
(4)
式中ω為系統諧振頻率。圖6中逆變器輸出電流、流過發射線圈的電流和負載電壓計算如下。
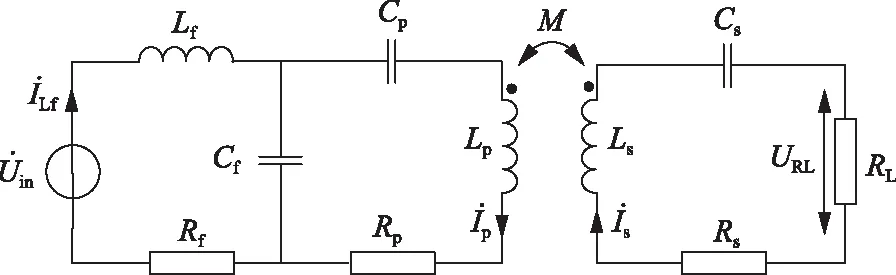
圖6 LCC-S型無線電能傳輸系統等效電路
逆變器輸出電流
(5)
其中輸入阻抗
(6)
從式(5)可以看出,逆變器輸出電流主要分為2個部分:第1部分為固定量ILf1,與負載無關;
第2部分為浮動量ILf2,與系統當前負載及互感有關。
流過發射線圈的電流
(7)
由式(7)可以看出,式中不含M及副邊電路相關參數,驗證了LCC-S結構原邊恒流輸出的特性。
負載電壓
(8)
由式(8)可以看出,負載電壓與發射線圈電流、系統工作頻率、互感大小有關,而當系統參數設計完成后,發射線圈電流與工作頻率均為固定值,因此可以認為URL僅與M有關。
基于上述分析,感應電壓僅與互感變化有關,且互感變化僅由隔離開關運動帶來,因此感應電壓與隔離開關位置間存在唯一映射關系,可以作為隔離開關是否合閘的判據。
2.2 系統參數設計
本系統中濾波電容、發射線圈電感和諧振電感等參數的設計如下。
本系統逆變器所需直流電源由工頻電壓經整流濾波得到,濾波電路采用帶電容濾波的橋式整流電路,因此濾波電容C應滿足
(9)
式中:T為交流電源周期;
R為整流環節后級等效負載。
紋波電流的大小將限制原邊發射電感的大小,系統紋波電流
(10)
Irms=aIL,av.
(11)
式中:Ud為逆變器輸入電壓;
Up為逆變器輸出電壓;
fSW為開關頻率;
a為紋波系數;
IL,av為電感電流平均值。可得電感
(12)
電感電流的紋波系數按照系統實際需求給定,一般為0.3~0.4,紋波系數越大,所需電感越小,根據式(12)計算發射線圈電感Lp。
逆變器輸出電流如式(5)所示,當隔離開關完全合閘時M值最大,記為Mmax,因此逆變器最大輸出電流
(13)
給定負載功率需求
P=URLIs.
(14)
聯立式(5)、(7)、(8)、(14)建立方程組,求解可得諧振電感
(15)
將式(15)代入式(4)求解諧振電容Cf,
(16)
根據上述分析制訂系統的參數設計流程,如圖7所示。

圖7 參數設計流程
需要注意的是,影響系統檢測精度的因素主要有2個方面:一方面為耦合機構對發射、接收線圈間互感變化的敏感度,耦合機構對于互感變化的敏感度越高,在隔離開關動作過程中感應電壓變化曲線斜率更大,有利于準確判斷隔離開關當前開關狀態;
另一方面為系統運行過程中電磁環境干擾,在電磁干擾下開關狀態判斷閾值電壓(U1、U2)與實驗室測得可能存在一定差異,因此在實際運行過程中需要根據實際現場環境進行二次校準。
3.1 實驗平臺介紹
為了驗證本文所提出方法的有效性,搭建如圖8所示的基于電磁感應原理的隔離開關分合到位判斷裝置。副邊處理器及相關負載采用無線供電的方案,因此隔離開關完全合閘時感應電壓幅值應同時滿足負載供電需求,理論設計電壓為4.5~5 V。

圖8 實驗裝置
實驗平臺原邊控制器采用TMS32028335數字信號處理器,整流環節采用不控型橋式整流,逆變器采用基于GaN平臺的高頻逆變器,副邊處理器使用STC12C5A60S2系列單片機,該款單片機帶有高速10位8路A/D采樣功能,可以滿足本系統的采樣精度要求;
接收線圈整流電路采用安森美公司的NMLU1210TWG型整流模塊,穩壓芯片采用TI公司LM2623型DC/DC芯片,該款芯片可將0.8~14 V電平轉換為5 V電壓輸出。藍牙通信模塊使用DL-20無線串口模塊,該模塊為串口轉2.4 GHz無線模塊,通信速率可滿足實驗要求。發射線圈與接收線圈均采用螺線管型線圈,且線圈內徑均為30 cm,其中:發射線圈線徑為2.88 mm,繞制匝數50匝;
接收線圈線徑為1.08 mm,繞制匝數20匝。模擬隔離開關底座與隔離開關本體間距離為1.2 m,隔離開關本體可以實現90°旋轉。
具體系統實驗電路參數有:f=500 kHz,Lf1=26.59 μH,Cf1=3.81 nF,Cp=0.14 nF,Lp=744.54 μF,Ls=142.82 μF,Rs=1.31 Ω,Cs=7.505 nF。
3.2 系統實驗驗證
本系統逆變器直流電源由工頻電源整流得到,經逆變器作用將直流電轉換為頻率為500 kHz交流電,經過諧振補償電路的作用,系統工作于整體諧振狀態。圖9所示為原邊逆變器輸出電壓up及電流ip的波形,電壓輸出為方波,但受限于實際元器件工作狀態,電平并未呈現理想狀態的平滑波頭。由于系統工作于諧振狀態,ip亦為同頻的正弦波。
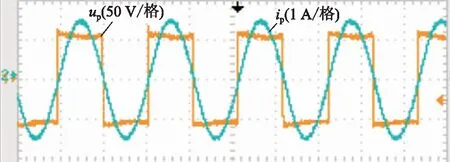
圖9 逆變器輸出電壓及電流實驗波形
當隔離開關固定在空間某一位置時,發射、接收線圈間互感固定,此時副邊能量接收穩定。取隔離開關完全合閘位置,接收線圈交流側能量接收情況如圖10所示,從圖中可以看出電壓波形為方波,電流波形為同頻的正弦波,與原邊保持一致,且電壓輸出幅值可以滿足負載供電需求。

圖10 接收端交流側感應電壓及電流實驗波形
當隔離開關處于完全合閘狀態時,根據前文理論可知,發射線圈與接收線圈完全正對,兩線圈間互感達到最大,因此感應電壓也達到最大。圖11所示為完全合閘狀態時接收端直流側感應電壓Us,DC的波形,從圖中可以看出此時感應電壓經過整流電路以及穩壓模塊的作用,波形為穩定的直流電壓且可以滿足負載供電需求。

圖11 接收端直流側感應電壓波形
隔離開關動作過程中,互感兩線圈間互感隨著隔離開關本體動作而變化,圖12所示為開關動作過程中互感及整流后感應電壓Us,DC變化,其中偏移量以隔離開關完全合閘狀態線圈位置為基準,線圈沿隔離開關軸向偏移。

圖12 隔離開關動作過程中兩線圈間互感及感應電壓變化曲線
從圖12中可以看出,隨著偏移量的增大,兩線圈間互感隨之減小,感應電壓同時減小,且感應電壓與互感之間變化趨勢幾乎相同,因此也驗證了前文中隔離開關動作過程中兩線圈互感與感應電壓之間存在單一映射關系,可以作為隔離開關是否分合到位的判據的結論。根據前文所述基于電磁感應原理的隔離開關狀態判別方法可知,當且僅當感應電壓達到2.6 V時可判定隔離開關完全合閘,驗證了所提方法的有效性。
由圖12可知:當偏移量為0.3 m時,發射、接收線圈在空間位置上相切,此時感應電壓為2.19 V,因此將U1設置為2.19 V;
當偏移量為0時,發射、接收線圈在空間位置上正對,感應電壓為2.61 V,因此將U2設置為2.61 V。結合式(2)中所涉及的隔離開關判別邏輯,則隔離開關狀態判別結果為:當感應電壓小于2.19 V時,認為隔離開關處于未合閘狀態;
當感應電壓等于2.19 V時,認為隔離開關開始合閘;
當感應電壓大于2.19 V但小于2.61 V時,認為隔離開關處于不充分合狀態;
當感應電壓等于2.61 V時,認為隔離開關處于完全合閘狀態。
本研究首先總結了現有的隔離開關位置輔助確認技術,分析現有技術中存在的不足;
接著提出一種基于電磁感應原理的隔離開關分合狀態判斷方法,根據隔離開關運動過程中發射、接收互感變化引起的感應電壓變化,實現隔離開關位置的判斷,判斷結果可作為輔助判據,該系統與隔離開關輔助接點信息系統一同形成非同源的隔離開關位置“雙確認”系統;
然后給出參數設計流程及方法;
最后搭建實驗樣機,驗證所提方法的有效性。
但本研究也存在一定的不足:目前只是在實驗室中對基于電磁感應原理的隔離開關位置判斷方法的可行性進行了初步驗證,并未充分考慮實際工作現場中的復雜電磁環境。如何實現復雜電磁環境下更加可靠的隔離開關位置判斷,將是下一階段的研究重點。
猜你喜歡互感合閘諧振基于ATP-EMTP的330 kV空載線路非同期合閘過電壓研究青海電力(2021年2期)2021-07-21330 kV空載線路非同期合閘過電壓的研究農村電氣化(2021年7期)2021-07-19大型接地系統接地阻抗測量的引線互感分析湖南電力(2021年2期)2021-05-08例談《互感和自感》的教學設計中學物理·高中(2016年12期)2017-04-22諧振式單開關多路輸出Boost LED驅動電源西南交通大學學報(2016年3期)2016-06-15基于CM6901 的LLC半橋諧振開關電源設計通信電源技術(2016年4期)2016-04-04基于Hilbert變換的斷路器選相合閘技術的研究電測與儀表(2015年20期)2015-04-09諧振式浮軌扣件的安裝工藝城市軌道交通研究(2015年3期)2015-02-27《互感和自感》教學設計物理教學探討(2014年3期)2014-09-05高效半橋LLC諧振變換器的參數設計及仿真自動化與儀表(2014年10期)2014-02-26